基础设置¶
机架设置¶
为了更好的支持和适配不同无人机平台,飞控提供了机架参数,不同机架的核心差异在于动力或舵面的数量及位置、布置的不同,例如垂直尾翼与V尾有较大差异、旋翼电机转向不一样等。另外根据机架,对区别较大的飞行参数设置了默认值,例如PID内环参数、盘旋半径、前转换超时时间等。
可在飞控设置->机架设置界面选择机架,设置完成后需要重启生效。

遥控器设置¶
在飞控设置->无线遥控界面进行遥控器设置。
模式设置¶
选择一个绑定至三段拨杆的通道映射至模式通道,默认是使用通道5。
默认飞行模式1为手动、飞行模式4为定高、飞行模式6为定点。
校准¶
根据遥控器类型勾选RC模式,点击“开始”按钮,根据提示进行校准即可。

电机设置¶
校准¶
先根据电机产品说明完成校准!
确认电机转向¶
根据机架设置,在地面站界面中确认电机转向。
舵面反向设置¶
舵面反向设置仅对VTOL、固定翼有效,多旋翼机型忽略。
切至固定翼飞行模态,遥控器解锁后进行舵面控制,若舵面反向,则可通过如下参数设置对应舵面。如果原值为0则改为1,如果原值为1则改为0。
| 参数 | 对应引脚 | 对应设备(根据实际机型确定) |
|---|---|---|
| PWM_AUX_REV1 | FCS_CH9 | 左副翼 |
| PWM_AUX_REV2 | FCS_CH10 | 右副翼 |
| PWM_AUX_REV3 | FCS_CH11 | 升降/左V尾 |
| PWM_AUX_REV4 | FCS_CH12 | 方向/右V尾 |
舵面配平设置¶
舵面配平仅对VTOL、固定翼有效,多旋翼机型忽略。
切至固定翼飞行模态,遥控器解锁后进行舵面控制,若舵面不在中位,则可以通过以下参数进行调整。
| 参数 | 对应引脚 | 对应设备(根据实际机型确定) |
|---|---|---|
| PWM_AUX_TRIM1 | FCS_CH9 | 左副翼 |
| PWM_AUX_TRIM2 | FCS_CH10 | 右副翼 |
| PWM_AUX_TRIM3 | FCS_CH11 | 升降/左V尾 |
| PWM_AUX_TRIM4 | FCS_CH12 | 方向/右V尾 |
注意,参数范围为-0.2~0.2,也就是最多只能调整20%,若舵面偏离过大,则需要进行机械调整。
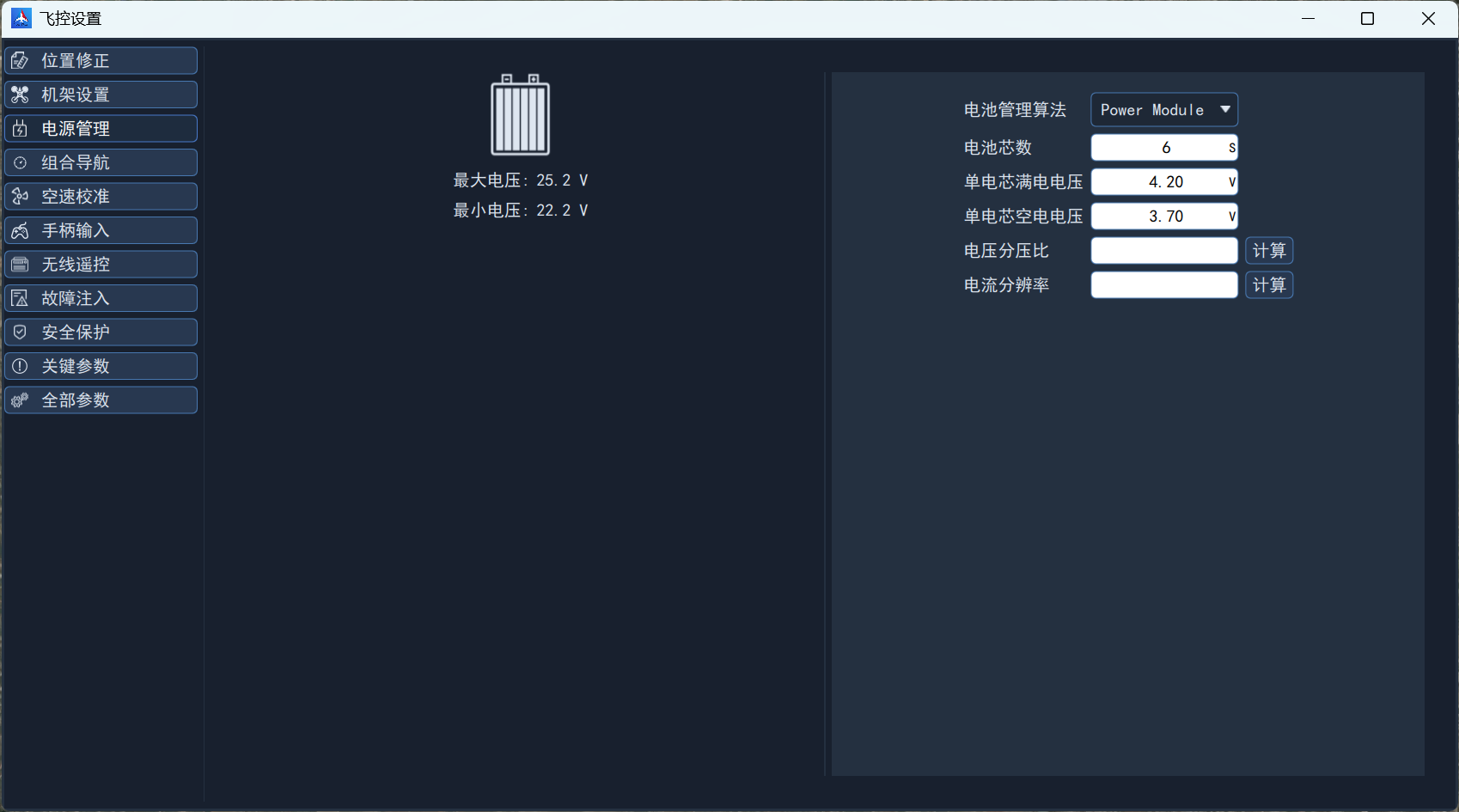
校准电池电压¶
首先使用万用表测量动力电池电压,然后上动力电,进入飞控设置->电源管理界面,输入电池芯数,点击电压分压比计算按钮,输入测量电压后点击计算。